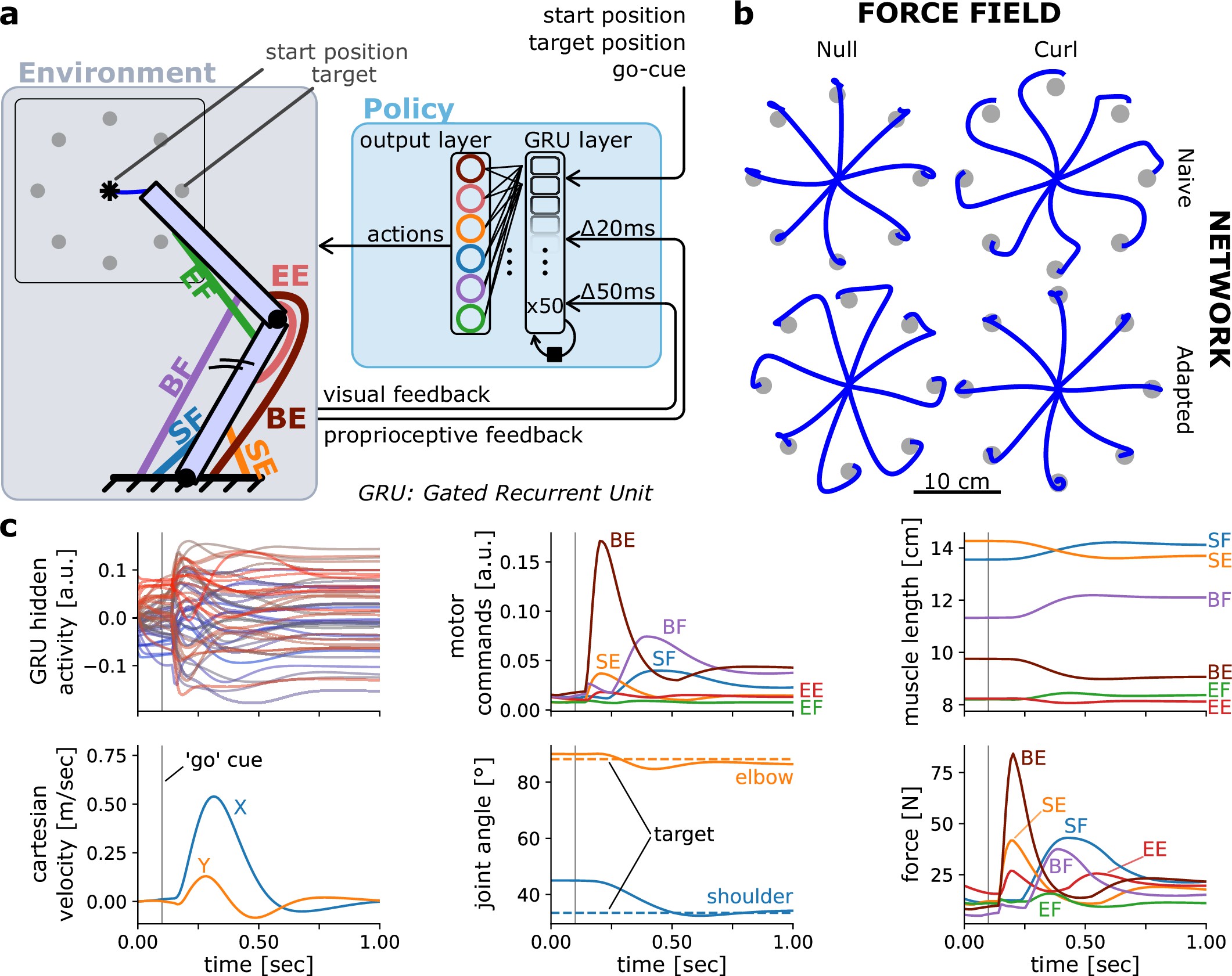
Computational Models of Motor ControlWe use computational models of neuromuscular systems such as the upper limb to test hypotheses about how the brain controls voluntary movement, and how motor learning is achieved. An emphasis is placed on including realistic physiological, mechanical and neural properties of the neuromuscular system. We use models to study the form of time-varying control signals to muscles that the central nervous system must generate to produce voluntary movement. We combine model predictions with empirical measurements of limb kinematics and patterns of muscle activation measured using electromyography. Recently we have begun to develop artificial neural network models that can be trained to control physiologically realistic neuromuscular models of upper limb movement (MotorNet). We use them to test hypotheses about how information for skilled movement and for motor learning is represented across a distributed network of computational units. |
 |
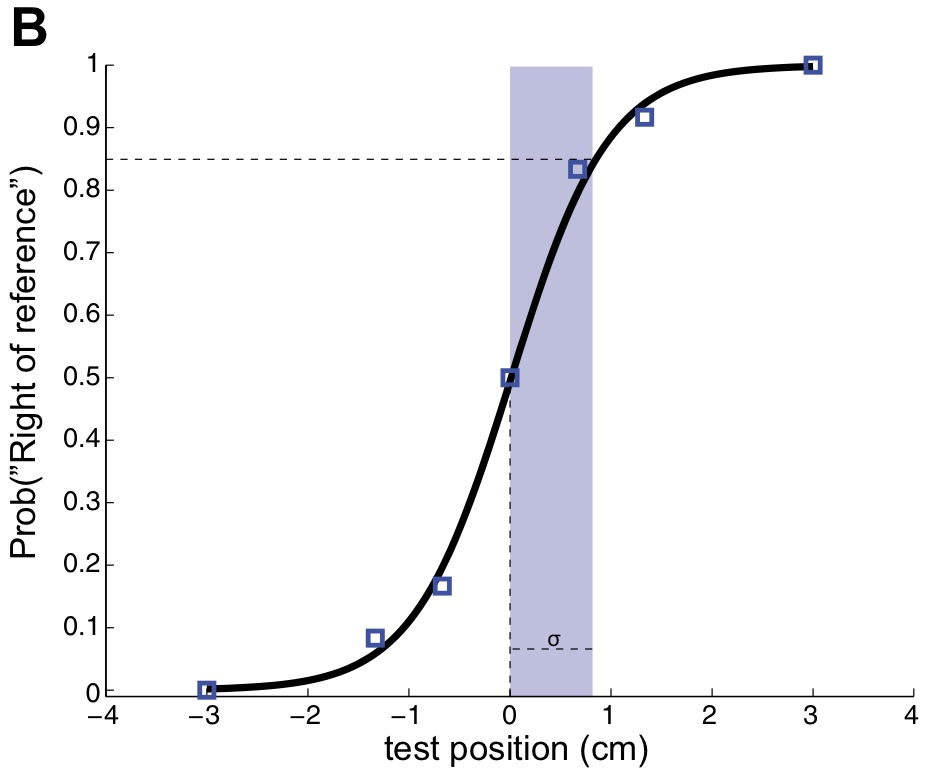
Sensory Neuroplasticity & Motor LearningA large body of research has explored how adaptation in sensory systems (e.g. vision and proprioception) affects motor performance, however we know little about how motor learning affects the function of sensory systems. The goal of this project is to explore changes in visual and somatosensory systems as a consequence of motor action and in particular, motor learning. Experiments are designed to test the hypothesis that visual and somatosensory processing are modulated in specific ways with recent motor behaviour and are further modified after motor learning. The idea is that motor learning changes not only motor behaviour, but also changes how we sense and perceive our own actions, and the world around us. |
 |
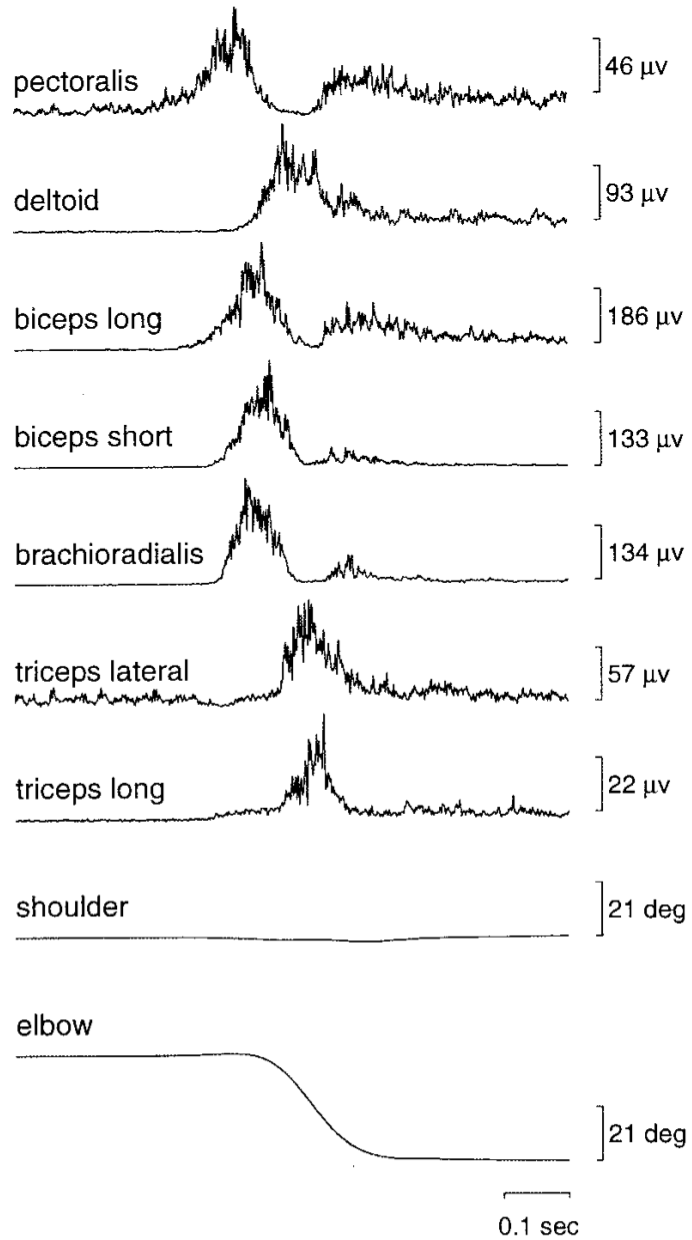
Neural Control Signals for Multi-Joint Limb Movement and Motor LearningIn order to achieve accurate limb movements, the central nervous system must generate appropriate time-varying control signals to muscles that account for mechanical and dynamical effects of the musculoskeletal system as well as external loads. We study how the motor system achieves this by measuring patterns of muscle activation during multi-joint limb movements, skilled finger movements, and over the course of motor learning. Recently we have begun new projects in which we use Myomatrix arrays to record from individual motor units in muscles controlling the fingers to test ideas about the organization of neural control of sklled finger movements. |
 |
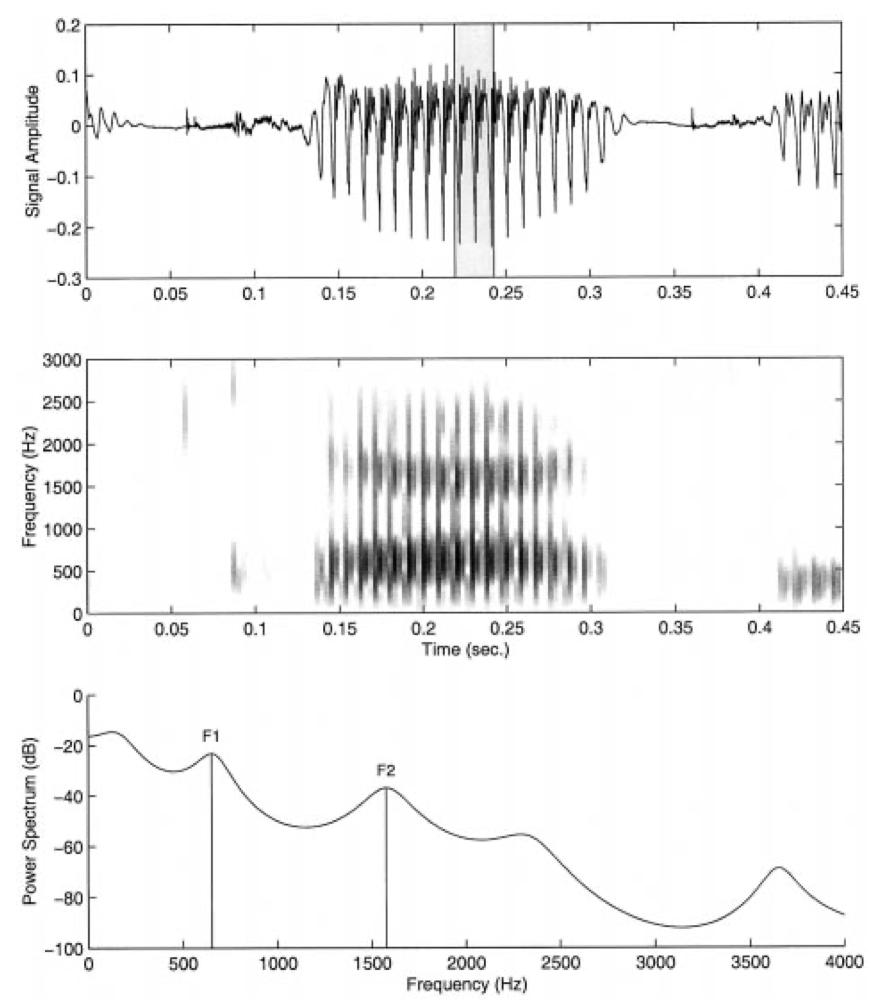
Speech Motor LearningWe are interested in motor learning in speech production, in particular using experimental models of auditory perturbations such as formant shifts. This is a relatively new research thread in the lab. Aims include establishing links between sensory/motor adaptation in the upper limb and in speech production, and also studying the ways in which these two sensorimotor systems differ, in particular in the context of sensory/motor learning. |
 |
Motor Learning by ObservingA powerful idea in neuroscience links motor control with action observation. Recent work has demonstrated that when we observe the actions of others we activate the same neural circuitry responsible for planning and executing our own actions. While much of the work in this area has been centered around cognitive and social mechanisms such as action understanding, empathy and theory of mind, we have been pursuing a wholly different idea, namely that neural mechanisms linking observation and action also facilitate neuroplasticity in somatosensory and motor regions of the brain, and can result in behavioural benefits for motor skill learning. |
 |
Research Funding
Our research is (or has in the past been) funded by grants from NSERC (Canada), CIHR (Canada) and NIH (USA).